December 2012,
–
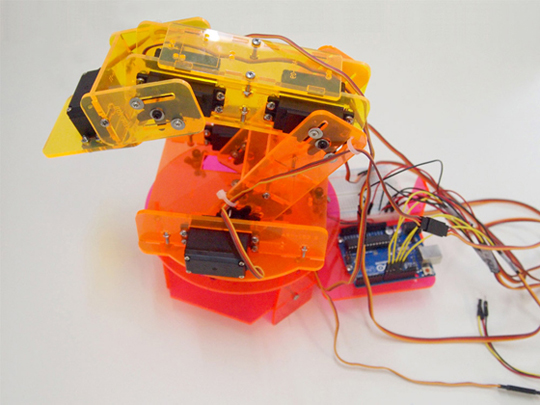
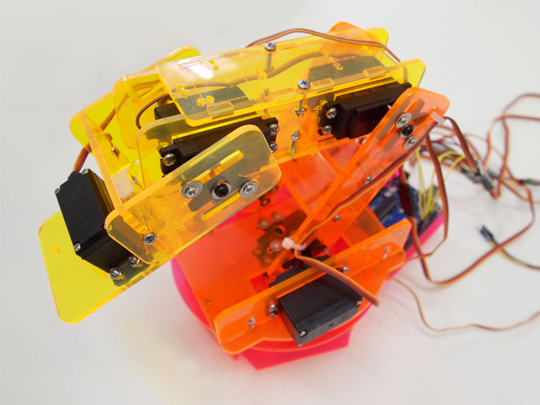
Building a six-servo robotic arm and controlling it with arduino and max MSP.
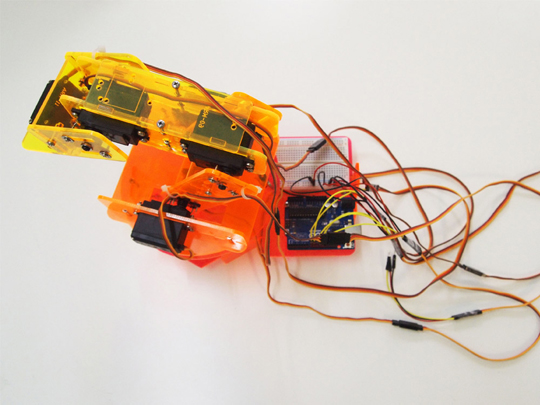
For my final project of physical computing I decided to build a robotic arm, controlled by six standard-sized servo motors.
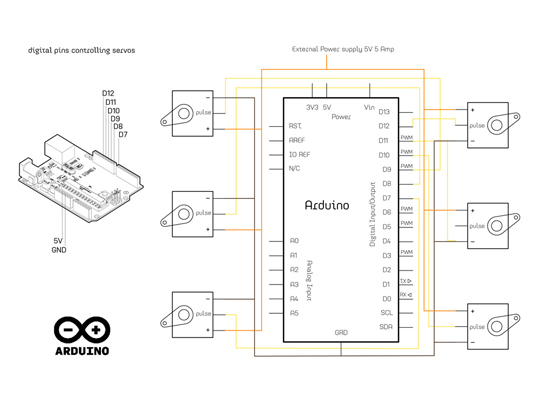
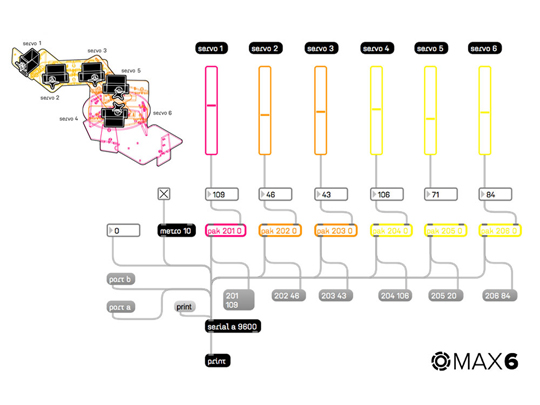
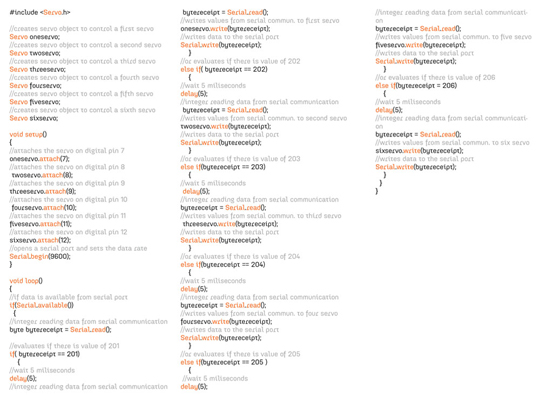
The idea was to control servos of the robotic arm with an arduino code, using a serial communication with a bunch of different software such as Processing or Max MSP.
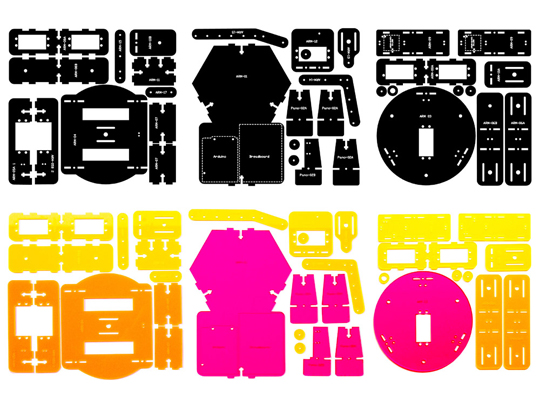
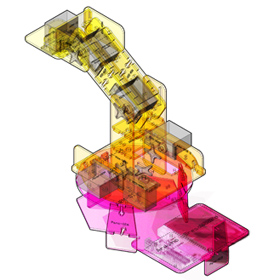
As a basis for building a robotic construction I used an open-source robotic arm from Oomlout. The structure of the robot consists of 26 parts, which need to be laser-cut, either from a 3 mm thick wooden panel or an acrylic glass sheets. Parts are then assembled, using 3mm screws and nuts.
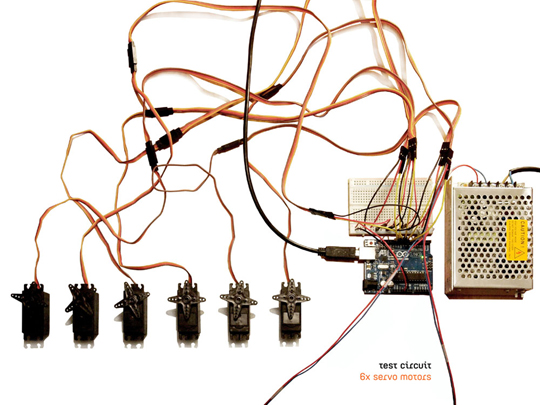
materials required: 3mm thick sheets of acrylic glass or wood, screws and nuts (3mm), electronics: arduino board, breadboard, jumping wires, servo extension cables, 6 standard servo motors (4.8-6V, 6 kg/cm, 40 grams), external power supply for servo motors (25 W, 5V, 5 Amp) software: Arduino+servo library, Max msp (for serial communication and control interface) other software possibilities for serial communication and servo control: Processing, Open CV…